DOBOT M1
Brațul robotic colaborativ Scara

DOBOT M1 este un braț robotizat inteligent și eficient din punct de vedere al costurilor, proiectat pentru industria ușoară, cu o precizie ridicată, o gamă largă de aplicații și funcții și o dezvoltare secundară. M1 este capabil să efectueze mai multe procese de fabricație, cum ar fi lipirea, sortarea cu recunoaștere a imaginii și conectarea PCB, pentru un sistem industrial ideal, inteligent și personalizat.
Design modular, flexibilitate remarcabilă
Designul modular al seturilor de feronerie le face ușor de asamblat și de instalat. Utilizatorii pot alege din diferite module pentru a-și îndeplini sarcinile sau în funcție de nevoile lor de predare, dezvoltându-și astfel competențele și dobândind o mai bună înțelegere a cunoștințelor de bază ale M1.
Dezvoltare secundară, extensibilitate puternică

Mai multe interfețe extensibile sunt disponibile pentru a sprijini dezvoltarea secundară. Este dezvoltat pe o platformă ROS super deschisă pentru a duce imaginația elevilor la un nivel superior.
Navigație și control automat eficient
M1 combină detectarea mediului înconjurător, cartografierea precisă, poziționarea și navigarea, evitarea materialelor în condiții de siguranță, deplasarea în cerc în mai multe puncte și alte funcții robotice inteligente pentru a manipula eficient o gamă largă de materiale.
O mulțime de materiale didactice

Modulele tutoriale, cum ar fi urmărirea sarcinilor de bază, planificarea traseului, transportul obiectelor și kitul de viziune Dobot Robot Vision Kit contribuie la dobândirea pas cu pas a cunoștințelor pentru operarea roboților industriali.
Gamă largă de accesorii și unelte terminale
Compatibil cu o gamă largă de instrumente și accesorii finale, acesta va satisface chiar și cele mai specifice nevoi ale afacerii dumneavoastră. Este compatibilă cu dispozitive de prindere cu vid (este necesară o sursă de vid) și electrice, accesorii pentru transportoare, unități de procesare a imaginii și accesorii Modbus și PLC pentru comunicare.

Parametrii
Numărul de articulații | 4 |
Sarcina maximă de lucru | 1,5kg |
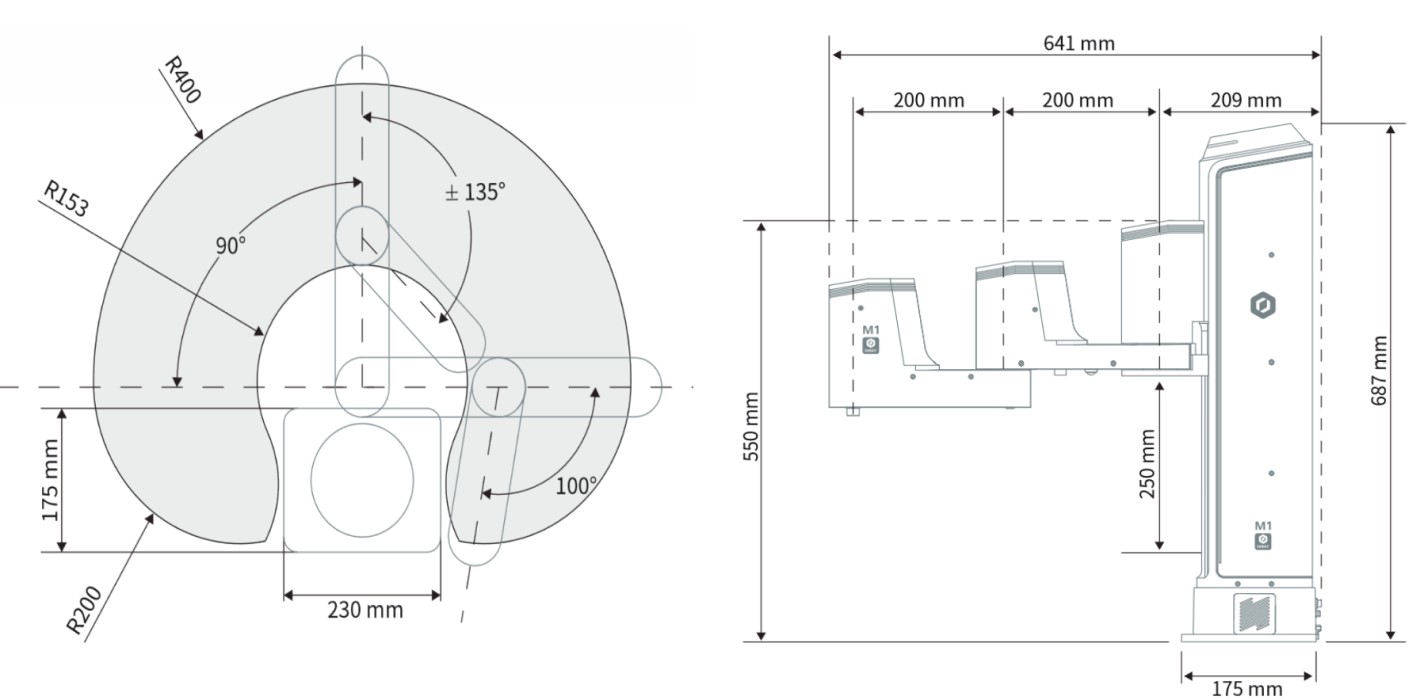
Raza maximă de lucru | 400mm |
Precizia de repetabilitate | ±0.02mm |
Dimensiunea bazei ( l. x l. ) | 230mm x 175mm |
| |
Libertatea îmbinărilor | J1 | ±85° |
J2 | ±135° |
J3 | 10mm ~ 235mm |
J4 | ±360° |
Viteza maximă a articulației | J1 | 180°/s |
J2 | 180°/s |
J3 | 2000mm/s |
J4 | 1000 mm/s |
Interfață I/O | DI | 24 |
DO | 22 |
Intrare ADC | 6 |
Tensiune de intrare | 100 ~ 240V (AC), 50/60Hz |
Tensiune nominală | DC 48V |
Comunicare | Ehernet, RS232C |
Mod de instalare | Desktop |
Temperatura de lucru | 0 ~ 40°C |
Software | M1 studio |
Sistem | Linux |
Conținutul pachetului
- 1 buc M1 braț robot
- 1 buc Cablu AC
- 1 buc Cablu DC
- 1 buc adaptor de alimentare
- 1 buc Conector cu 4 pini
- 1 buc buton de oprire de urgență
- 1 buc Cablu serial DB9
- 1 buc cablu de rețea
- Șuruburi și cheie Allen